文章图片
文章图片

文章图片
文章图片

文章图片
实话实说 , 我们距离完全成熟的自动驾驶 , 技术上、法律上、伦理上应当都还有一段不短的距离 。 但是 , 如果作为一个智能的“驾驶小助手”来衡量 , 有的车企已经做
在11月8日发布全新一代高端电子电气“星灵架构”之前 , 没有人知道 , 广汽埃安已经在智能驾驶领域卧薪尝胆、潜行修炼多时 。
激光雷达 , 红外遥感 , 星基定位 , 一个也不能少
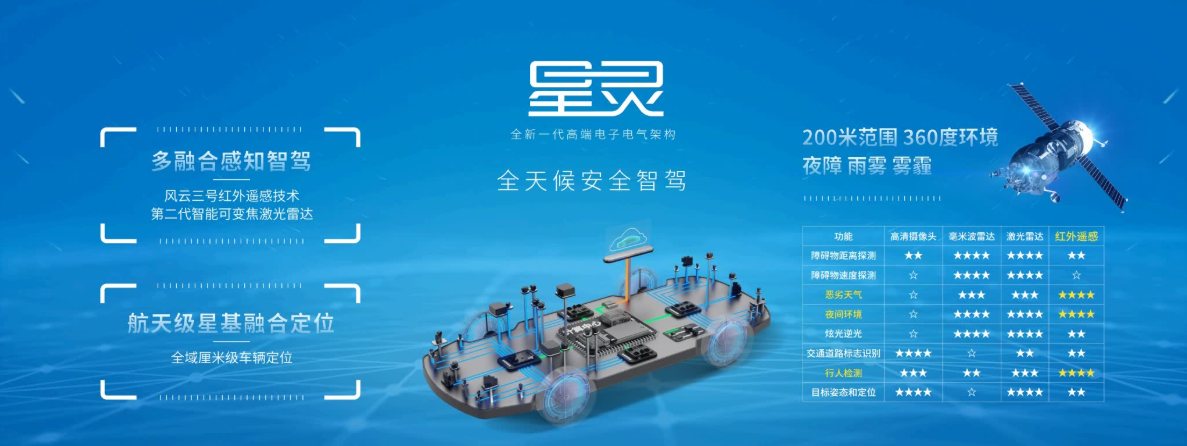
苦练内功 , 终究厚积薄发 。 发布会上 , 在众多专家、记者、车友面前 , 广汽埃安揭开了星灵架构的神秘面纱 。 实质上 , 星灵架构在去年已经发布的行业第三代电子电气架构EEA 3.0基础上 , 通过融合风云三号红外遥感技术、第二代智能可变焦激光雷达、航天级星基定位等多项高新技术 , 针对智驾安全进行了全面升级 , 同时对新一代智能纯电车的智驾安全问题给出了系统性的解决方案 。
对于星灵架构而言 , 硬件 , 是运行一切功能的基础 。 尤其在感知系统方面 , 越来越多的实例证明 , 纯视觉方案尽管成本较低 , 但很容易出现感知偏差 , 特别是在光线较差、雨雾、炫光等场景下;为了从根本上弥补视觉方案的缺陷 , 星灵架构纳入了3颗第二代智能可变焦激光雷达 。
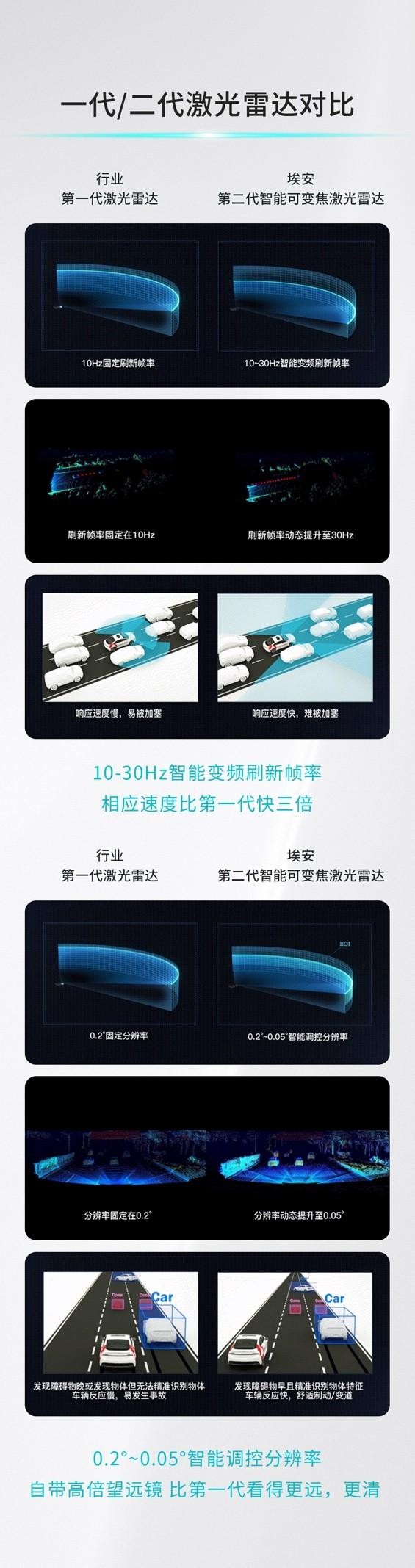
这3颗第二代智能可变焦激光雷达 , 拥有10-30Hz智能变频刷新帧率 , 响应速度比第一代快三倍 , 实现毫米级的应变能力不在话下 , 可以更好的应对城市路况中的加塞、鬼探头等突发状况 。 在高速路况 , 也能更早地预判风险 , 争取更多的应对时间 。
【centos|联合引擎|把硬件做到了极致的埃安,能在智能驾驶上超越特斯拉?】
但是 , 在极端恶劣天气下 , 又或者夜晚会车、进出隧道等容易出现眩光的场景下 , 即便是变焦激光雷达 , 也会偶发无法识别的状况 , 因此埃安不惜重本引入了红外遥感技术 。 利用生命体热辐射成像的红外遥感技术 , 即使在雨雾或昏暗环境中 , 依旧可以提供清晰成像、准确识别 。
除了可变焦激光雷达、红外遥感技术 , 星灵架构还应用了航天级星基融合定位技术 , 结合高精地图和惯导单元 , 可以实现全域厘米级的车辆定位 。 激光雷达 , 红外遥感 , 星基定位 , 得益于这套多硬件、多技术融合的感知系统 , 星灵架构已经可实现200米范围、360度环境、夜障、雨雾、雾霾等全场景全天候感知覆盖 。
敢装 , 敢不敢用?
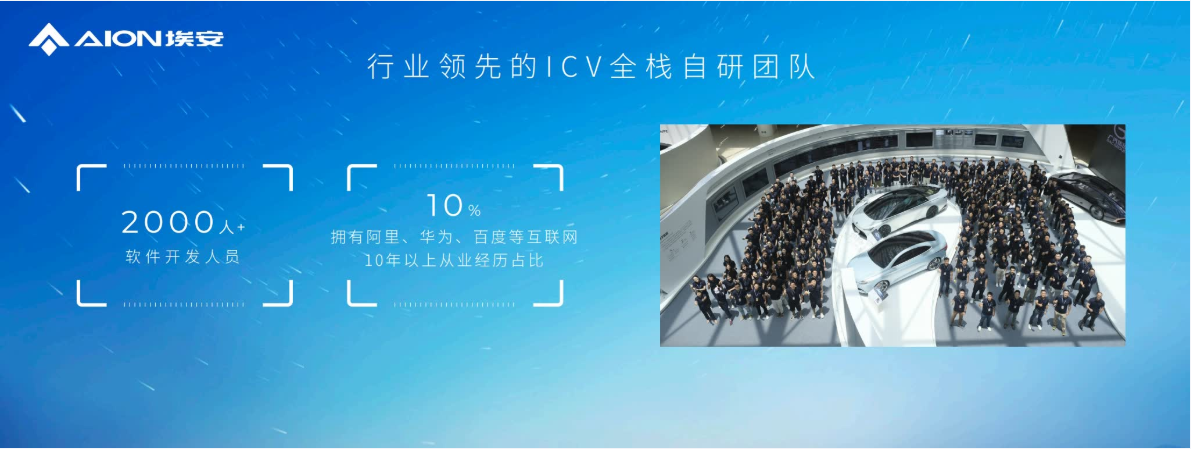
硬件 , 自然是一个也不能少;不过 , 硬件也只是运作一切功能的基础 。 为了实现硬件和硬件之间的完全同步 , 为了打磨好一套让消费者放心的智能驾驶系统 , 广汽埃安除了以硬件组成星灵架构 , 更投入了超过2000人的研发团队 , 进行软件开发以及全栈系统算法深度研究 。
埃安研发团队通过ADiGO PILOT数据闭环平台 , 对千万张场景图片进行感知训练及仿真验证 , 并结合超百万公里的实车验证 , 不断循环迭代 , 通过全栈自研的算法 , 修正硬件造成的感知场景偏差 , 从而将多感知系统融合发挥到极致 。
- 索尼|小米索尼联合研发索尼IMX989:本月将开放给同行使用
- |宁波市联合拼多多发放“双11专项补贴”,首波消费券上线受热捧
- 众所周知|一加acepro发布电池健康引擎,性价比真香
- 粮食安全|多重挑战下 联合国气候大会有何看点
- 搜索引擎|什么是description,如何优化描述标签?
- 本文转自:中国电子报9月3日上午|国家信息中心与燧原科技等联合发布《“东数西算”战略下绿色智算中心产业发展研究报告》
- web3|Rockstar Games 的联合创始人加入WEB3游戏工作室
- 本文转自:科技日报洪恒飞 科技日报记者 江耘“概念先行和零星的场景建设|突出大工程牵引 未来产业培育更需注重联合创新
- 由百度与央视新闻联合举办的“2022百度世界大会”在7月21日如期举行|百度量产无人车Apollo RT6发布,这般实力不容小觑
- 搜索引擎|网站页面标题优化要注意11个SEO问题